
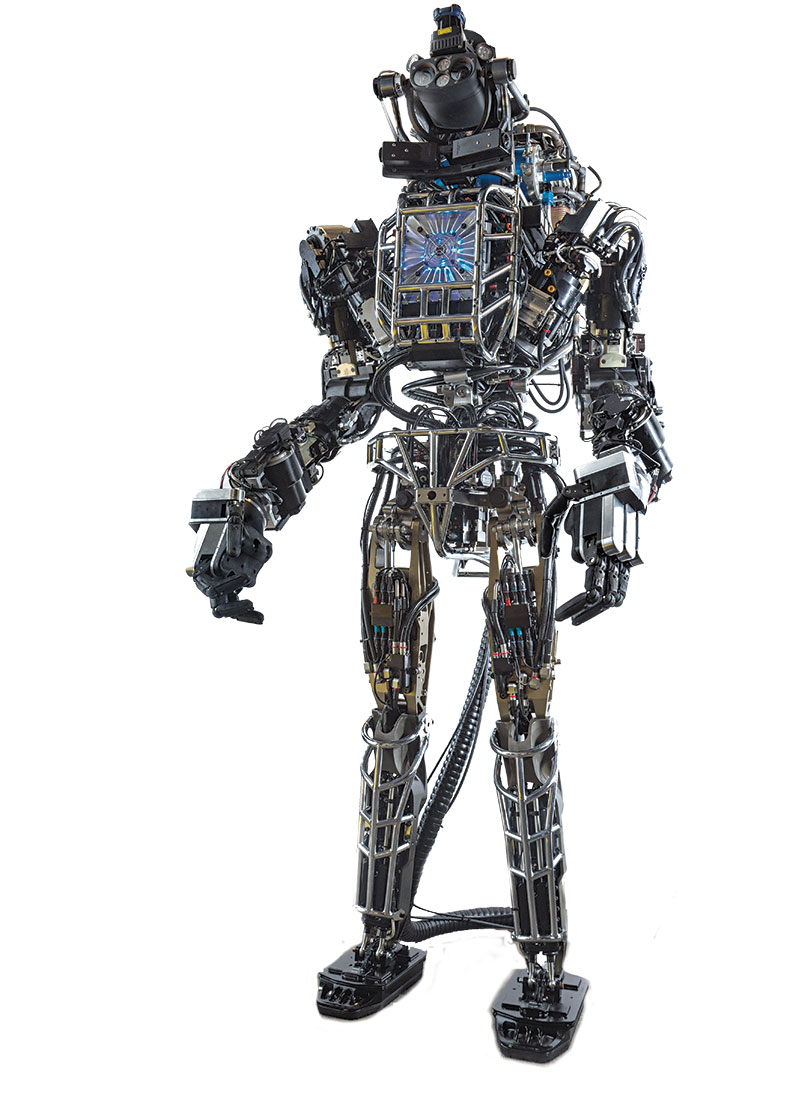
atlas::Using a DARPA-designed Atlas robot donated by Hong Kong University, the late-entry Team HKU resulted from a merger between Case Western Reserve University and a team from Japan, which originally entered as separate competitors in the software-only DARPA Virtual Robot Challenge. An assortment of remaining winners of the Virtual Robot Challenge will compete against each other by applying their own software designs to Atlas prototypes provided by DARPA.
See an early prototype of the Hubo robot doing pushups to train for the DARPA challenge.
valkyrie:: NASA’s Johnson Space Center promises a humanoid robot that uses designs and practices seen in a variety of other robotic iterations. (no prototype photo available)

schaft::Japanese company Schaft Inc. puts forth this eponymous entry that is almost entirely arms and legs and bears no resemblance to either Richard Roundtree or Samuel L. Jackson. No promises on performance, but each arm gets an extra elbow joint, which probably couldn’t hurt in the dexterity department.
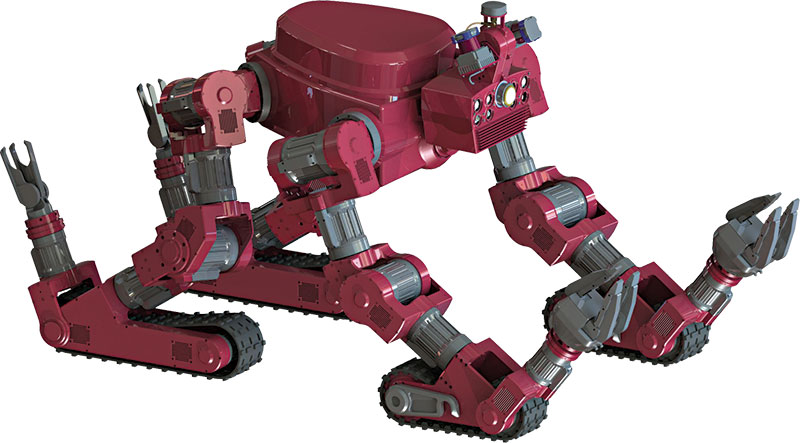
chimp::Carnegie Mellon University and the National Robotics Engineering Center join forces on the CMU Highly Intelligent Mobile Platform, which combines human-like size and dexterity with semi-autonomous operation and static—rather than dynamic—stability. Tank treads built into the legs and arms improve mobility and add to an overall Transformer-like appearance.

HUBO::Representing the home team, Drexel University huddles up with nine other institutions for this bi-pedal humanoid robot designed for both guided and autonomous operation. HUBO has human-like hands that can grip common tools and a new, rugged appearance. Team HUBO aims for a “program-test-perfect” model that will anticipate and address all the contest’s challenges.
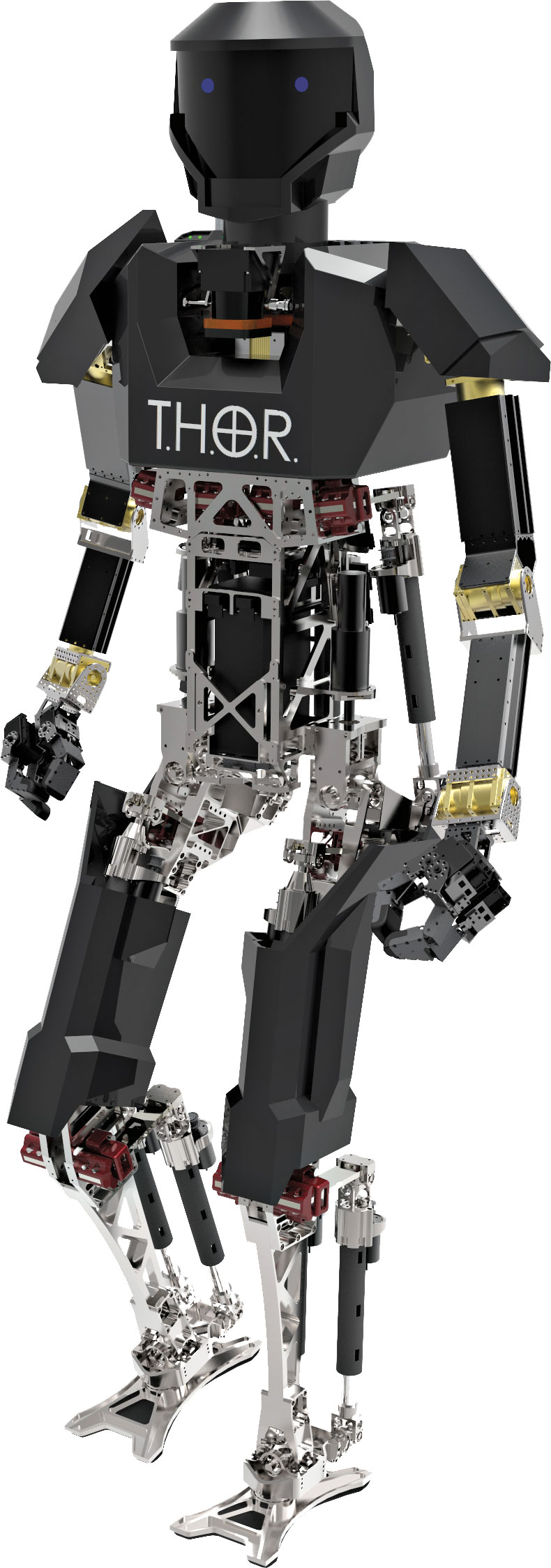
thor::Virginia Tech steps up with its Tactical Hazardous Operations Robot, which aside from acknowledging the need for creative naming, promises a light, agile and resilient humanoid that infers the intent of the operator.

robosimian::Looking more like a giant robotic spider than a monkey, this NASA Jet Propulsion Lab entry is designed to use all four limbs to increase dexterity and overall stability while moving and to anchor itself to supports like ladders, railings and stair treads.